Smart Helmet with Sensor-Based Crash Detection
ESP32-based intelligent safety helmet with automatic accident detection using MPU6050 sensor and emergency communication via SIM800L GSM module with real-time GPS location tracking.
Project Overview
An intelligent safety system designed to automatically detect motorcycle accidents and send emergency alerts with GPS coordinates.
Key Features & Objectives
Advanced safety features designed to protect riders and enable rapid emergency response
Intelligent Crash Detection & Monitoring
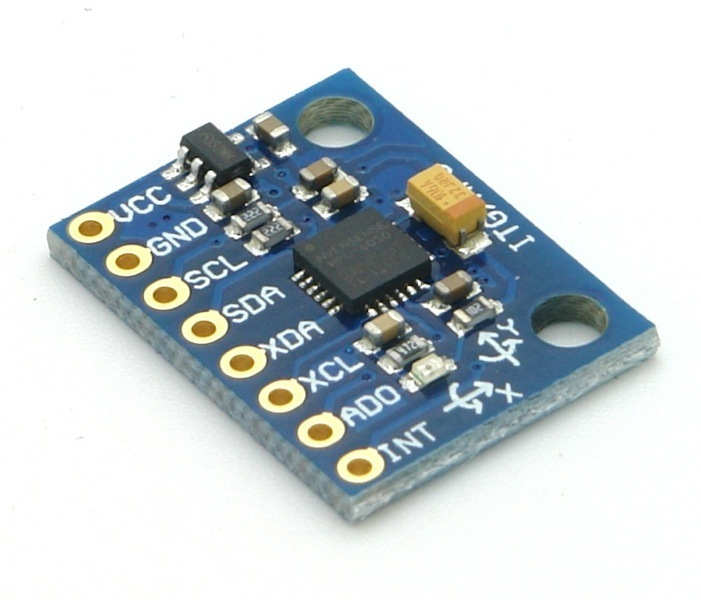
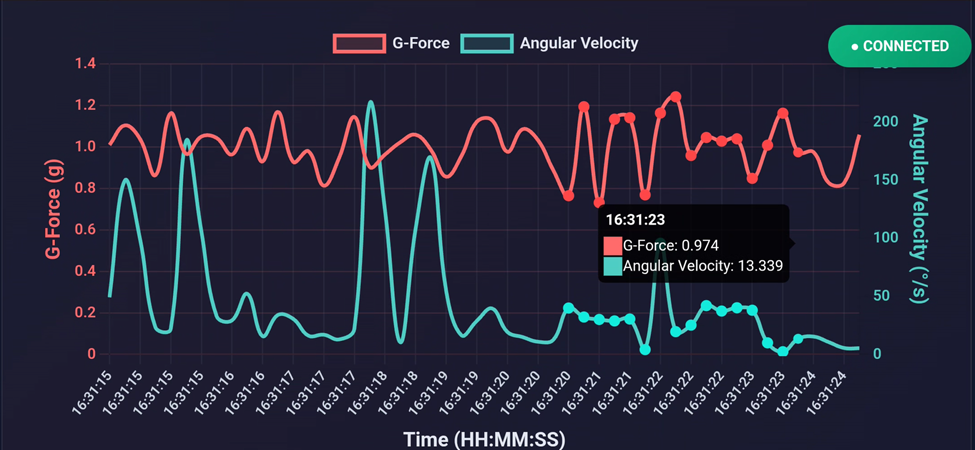
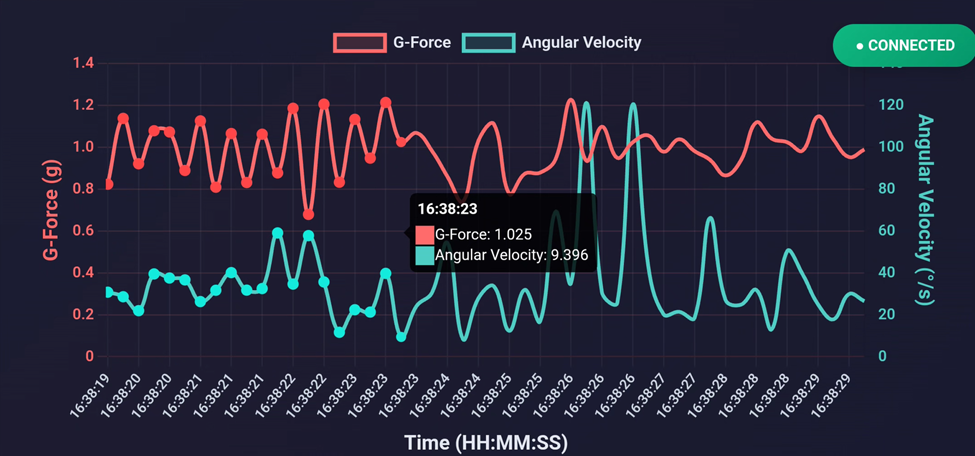
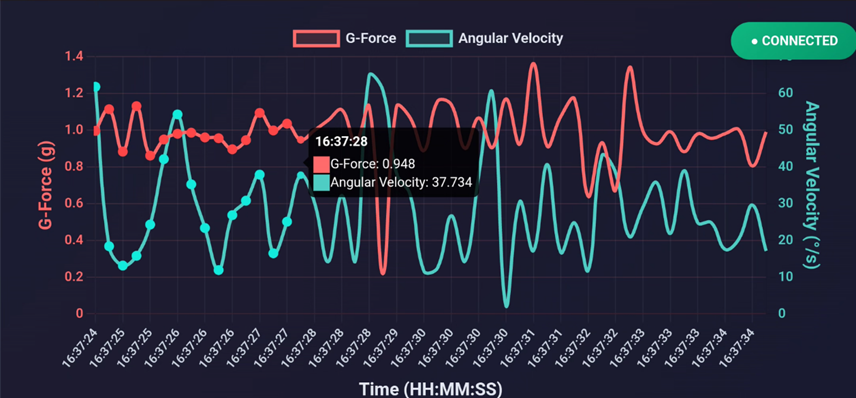
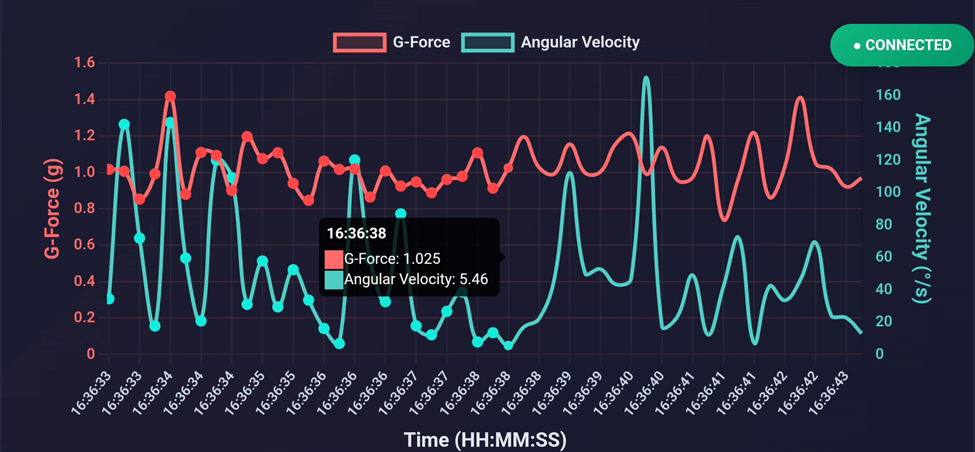
Continuous real-time monitoring with MPU6050 6-axis sensor using dual-threshold detection (≥2.2g acceleration, ≥190°/s angular velocity) for accurate accident identification with 10-second manual cancellation to prevent false alarms.
Emergency Response System
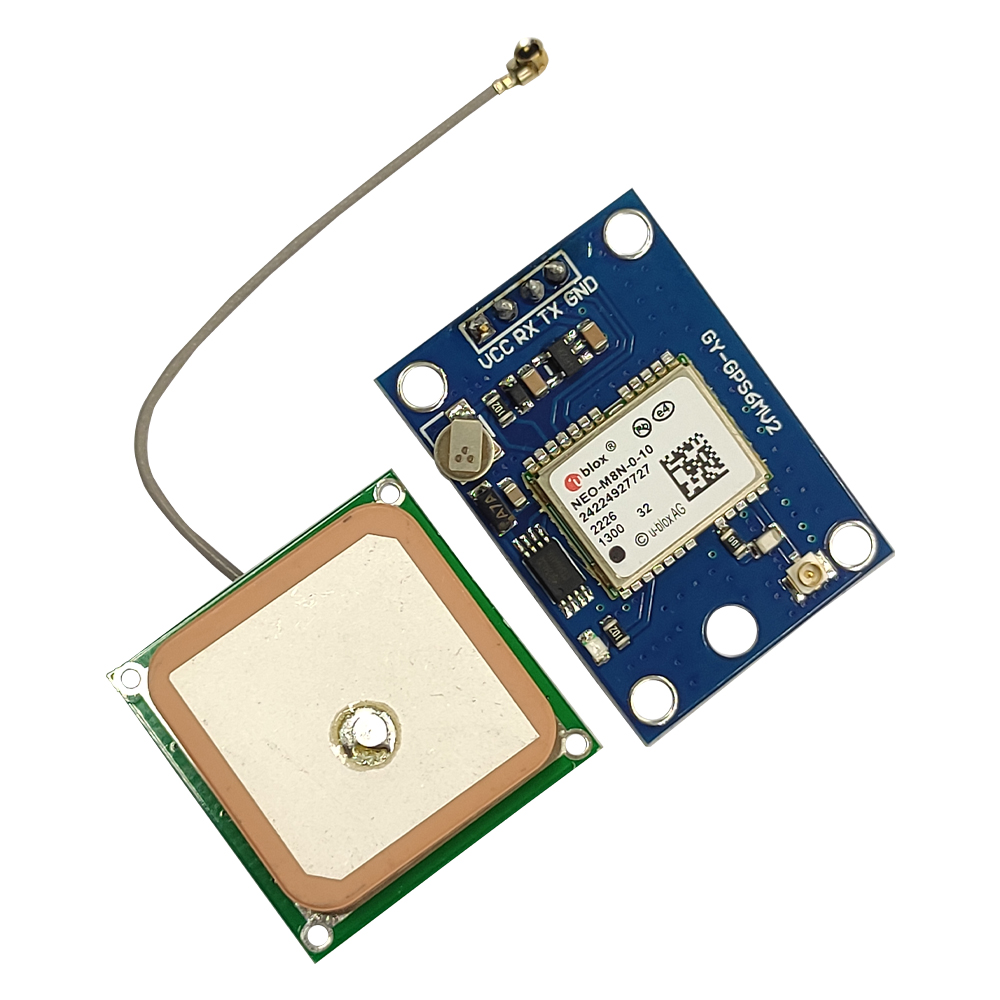
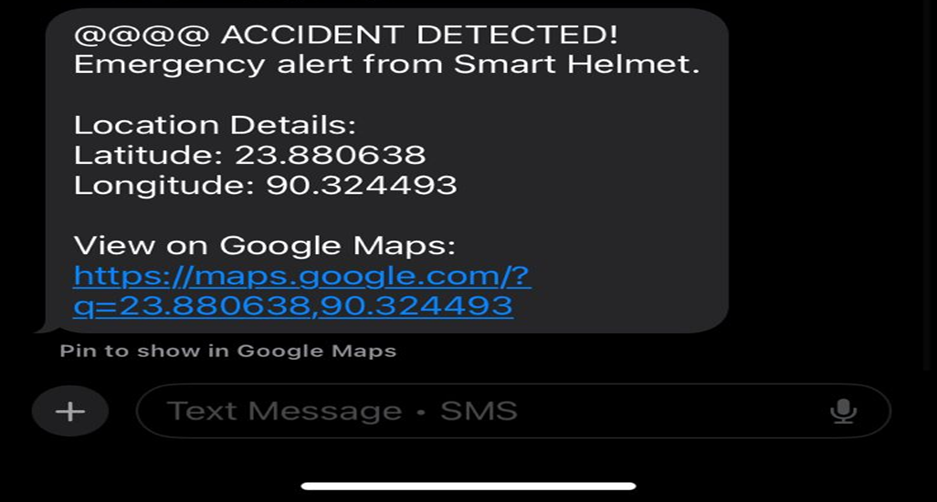
Automatic GPS location tracking with u-blox NEO-8M and instant SMS dispatch via SIM800L GSM module, sending Google Maps coordinates to emergency contacts with audible alerts and status display for comprehensive emergency communication.
Real-Time System Interface
OLED display shows live system status, sensor readings, and operational information with passive buzzer providing clear audio notifications including 10-second warning tones and 3-second beep patterns for user awareness.
Power Management & Reliability
Li-Po battery powered system with TP4056 charging module ensuring reliable operation and convenient recharging for continuous protection during all riding conditions.
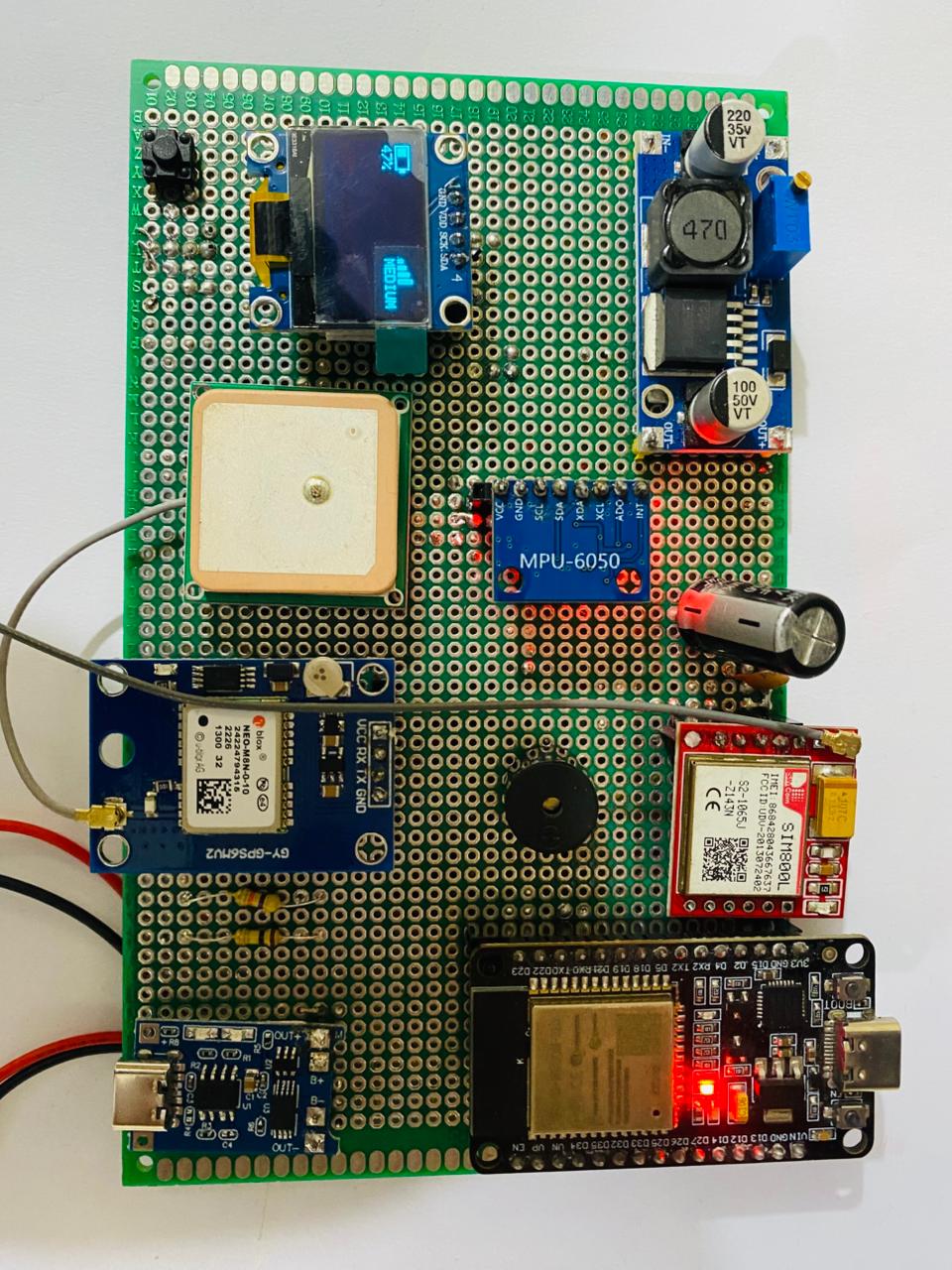
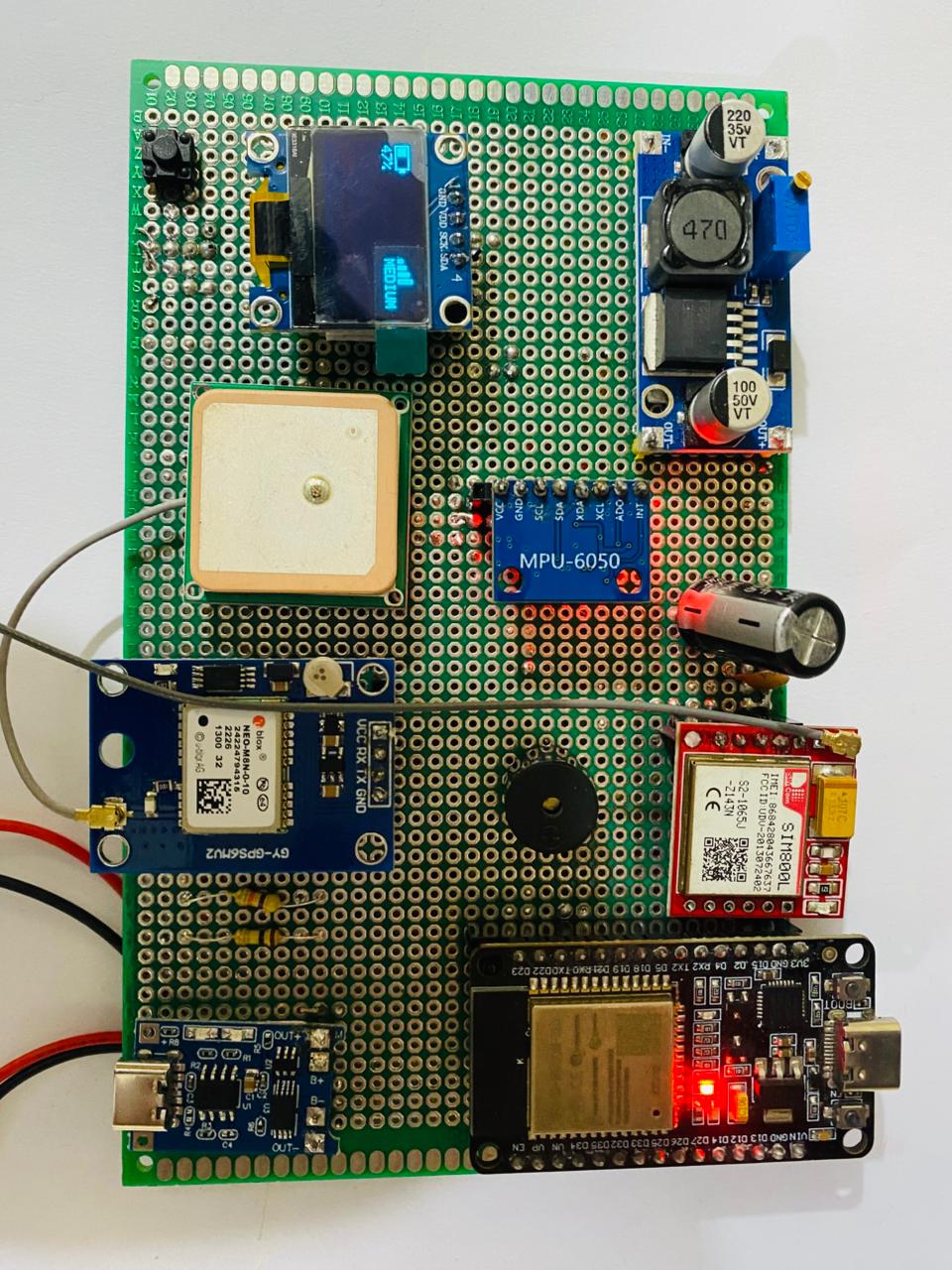
Hardware Components
Carefully selected components working together for optimal safety performance




System Design & Methodology
Intelligent workflow combining sensor fusion and communication protocols
System Operation Flow
1. Initialization Phase:
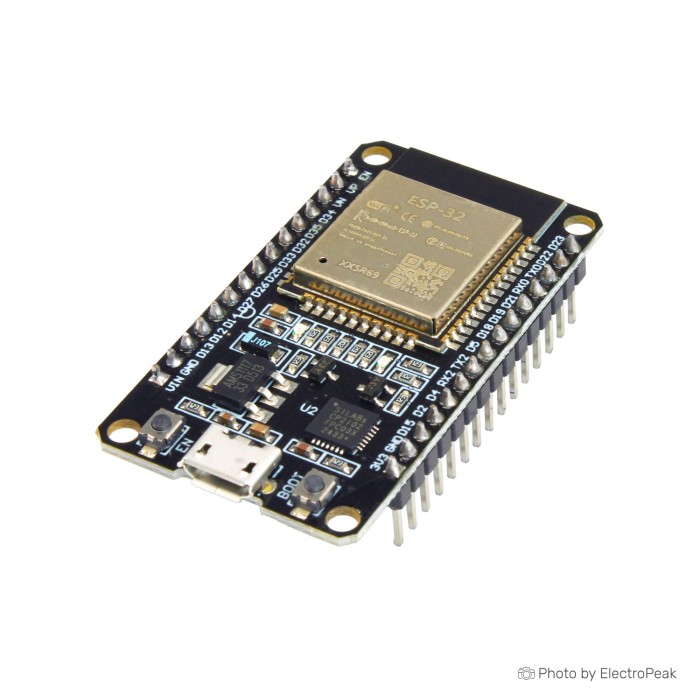
The system boots up, initializes all sensors (MPU6050, NEO-8M GPS, SIM800L), configures the OLED display, and establishes baseline motion parameters. The ESP32 validates all module connections and enters active monitoring mode.
2. Continuous Monitoring:
The MPU6050 sensor continuously samples acceleration and gyroscope data at high frequency. The ESP32 processes these readings in real-time, filtering noise and calculating resultant motion vectors to detect anomalies.
3. Crash Detection Logic:
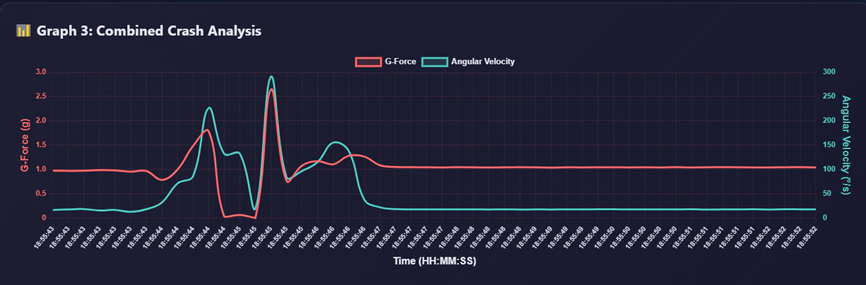
When acceleration exceeds 2.2g OR angular velocity surpasses 190°/s, the system recognizes a potential crash event. This dual-threshold approach ensures detection of both high-impact collisions and sudden rotational movements typical of accidents.
4. Warning Period:
Upon detection, a 10-second countdown begins with continuous buzzer warnings. The OLED displays a cancellation prompt. During this period, the rider can press the push button to cancel the alert if it's a false alarm (e.g., dropping the helmet, sudden braking).
5. GPS Acquisition:
Simultaneously with the warning period, the NEO-8M GPS module captures current coordinates (latitude and longitude). The system waits for GPS lock to ensure accurate location data before proceeding.
6. Emergency Alert Transmission:
If not cancelled within 10 seconds, the system activates the SIM800L module. It formats an emergency SMS containing the accident notification and Google Maps link with GPS coordinates, then transmits it to pre-configured emergency contacts.
7. Confirmation & Reset:
After successful SMS transmission, the buzzer emits a 3-second beep pattern for confirmation. The OLED displays transmission status. The system then resets to monitoring mode, ready to detect any subsequent incidents.
Key Design Considerations
- Threshold Calibration: Acceleration and angular velocity thresholds were determined through extensive testing to balance sensitivity and false alarm prevention.
- Power Efficiency: ESP32 sleep modes and optimized sampling rates extend battery life while maintaining responsive detection.
- GSM Reliability: SIM800L configured with automatic network registration and SMS retry logic for reliable communication even in areas with weak signal.
- User Interface: Clear visual and audio feedback ensures the rider understands system status and can respond appropriately during warning periods.
Results & Discussion
Demonstrating effective crash detection and emergency response capabilities
Successful Implementation
The Smart Helmet successfully detected simulated accidents while maintaining low false alarm rates, demonstrating reliable GPS tracking and effective emergency communication through the GSM module.
GPS Accuracy
NEO-8M module provided reliable location tracking with sufficient accuracy for emergency response, successfully generating shareable Google Maps links.
User Experience
Clear audio alerts and OLED status display provided intuitive feedback, enabling riders to understand system operation and respond appropriately to warnings.
Performance Analysis
Through rigorous testing under various conditions, the Smart Helmet demonstrated robust performance in its core objectives:
- Crash Detection Accuracy: High sensitivity to genuine accident scenarios while filtering routine vibrations and movements.
- Response Time: Complete detection-to-transmission cycle averaging 15-20 seconds including the 10-second warning period.
- GPS Lock Time: Location acquisition typically within 30-60 seconds under clear sky conditions.
- SMS Delivery: Consistent message transmission across different network providers with minimal delays.
The system successfully bridges the gap between accident occurrence and emergency response initiation, potentially reducing critical response times that are vital for accident victim survival rates.
Test Results & Scenarios
Challenges Faced & Solutions
Overcoming technical hurdles during development and implementation
Future Recommendations
- Cloud Integration: Implement cloud-based data logging for crash analytics and historical tracking.
- Mobile App: Develop companion smartphone app for system configuration, battery monitoring, and emergency contact management.
- Multi-Contact Alerts: Expand emergency notification system to support multiple contacts with priority levels.
- Impact Severity Assessment: Add algorithms to estimate crash severity based on sensor data for better emergency response coordination.
- Voice Communication: Integrate SIM800L voice calling capability for direct communication with emergency contacts.
- Weather Integration: Add environmental sensors (temperature, humidity) for crash condition documentation.
- Machine Learning: Implement ML algorithms for improved crash detection accuracy through pattern recognition.
Project Gallery
Visual documentation of the Smart Helmet development and implementation
Interested in This Project?
Explore more projects or get in touch to discuss safety technology innovations